-
Электронная почта
hengleyiqi@163.com
-
Телефон
18340091069
-
Адрес
Центральный район города Цзинань провинции Шаньдун
Категории продукта
- Усталость автомобиля
- Конструктивный стенд
- система испытаний на загрузку стальных ферм
- Многофункциональная установка для механических испытаний конструкций
- частотно - следящая реактивной стойки
- машина для испытания на пульсирующую усталость
- механическая система загрузки
- Похожие материалы
- электрогидравлический сервопривод
- машина для испытания на усталость при кручении
Цзинаньская компания приборов Henglexingke

Испытательная система зажимов для палочек для восстановления ракет - HJHS01
ДоговариваемыйОбновление на11/20
- Модель
- Природа производителя
- Производители
- Категория продукта
- Место происхождения
Обзор
Испытательная система захвата палочек для еды для восстановления ракеты - HJHS01 $r $n $r $n $n экспериментальная установка захвата для восстановления космического пространства - HLZZ $r $n $r $n $n система захвата для восстановления ракеты - прибор Hengle $r $n $r $n
Подробности о продукте
Испытательная система зажимов для палочек для восстановления ракет - HJHS01
Экспериментальная установка для захвата космического мусора - HLZZ
частотно - следящая захвата ракеты - прибор Henler
частотно - следящая испытания ракеты на захват
Испытательная система зажимов для палочек для рекуперации ракет
экспериментальная установка захвата ракеты
космическая система испытаний на захват

Испытательная система зажимов для палочек для восстановления ракет - HJHS01,Как две огромные механические руки, они установлены по обе стороны пусковой установки, как две гибкие "палочки для еды". Выполнив задание и вернувшись на Землю, он автоматически настраивает положение и медленно летит над стартовой площадкой. В тот момент, когда он приближается к стартовой площадке, эти роботизированные руки вытягиваются точно, как палочки для еды с пельменями, и осторожно захватывают Huojia, чтобы он неуклонно падал на стартовую площадку, не требуя, чтобы он сам приземлился. Это устройство на самом деле высокотехнологичная « машина для захвата куклы». Он основан на следующих научных принципах:
(1) Расчет: манипулятор должен рассчитать скорость, направление и высоту полета Huojian, своевременно отрегулировать положение, чтобы гарантировать, что « палочки для палочка» могут поймать Huojian. Это похоже на то, что "когти" для захвата кукольной машины должны быть нацелены на голову куклы.
(2) Управление ориентацией: при посадке Huojian необходимо отрегулировать свой угол и скорость, чтобы позволить себе медленно и прямо вниз « скользить». Так же, как вы управляете углом и силой руки, когда бросаете в баскетбол, убедитесь, что мяч попадает в корзину.
(3) Система обратной связи: Huojian и манипулятор оснащены датчиками, которые быстро реагируют на изменения окружающей среды. Как только Huojian слегка отклоняется от заданной траектории, система немедленно исправляется, чтобы обеспечить стыковку с "палочками для еды".
II. Технические параметры
1) Двигатель: диаметр перфорации 60 мм, модульная конструкция.
2) Номинальная тяга привода: 500 кН;
3) Датчик нагрузки: высокоточный радиальный датчик нагрузки;
4) Диапазон и разрешение измерений нагрузки: 4% - 100% FS, разрешение измерений нагрузки: 0,1 кН;
5) Точность измерения нагрузки: ±1% от значения в диапазоне 4 - 100%;
6) Загрузить номинальный маршрут: 200 мм;
7) датчик наклона с угловым разрешением выше 0,01 градуса;
8) Номинальная скорость привода: 2,5 мм / с;
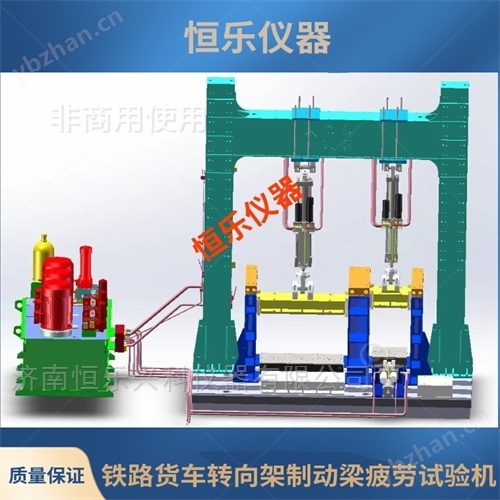
III. СТАТИСТИЧЕСКИЙ ЭЛЕГИЧЕСКИЙ СИСТЕМАТИЧЕСКИЙ ПОДГОТОВКА
1, 20000kN вертикальный электрогидравлический сервопривод привод, тяга: 20000kn, тяга: 6000kn; ход: 600mm. (±300mm);
2, главный каркас одностороннего горизонтального электрогидравлического сервопривода, тяга 6000 кН, тяга 4000 кН; ход ± 400 мм.
IV. СИСТЕМЫ КОНТРОЛЯ
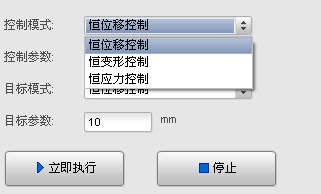
1. Многофункциональная механика загрузки системы управления программным обеспечением и набором контроллеров, основные функции программного обеспечения включают: управление постоянным напряжением, управление постоянным смещением, управление постоянной деформацией, могут быть установлены определенные этапы цикла. И может быть реализовано преобразование без удара между различными способами управления для достижения полностью автоматического управления замкнутым контуром. Управление смещением, нагрузкой, напряжением и временем удержания можно осуществлять не менее чем в четыре этапа.
2. Условия окончания этапа эксперимента могут быть выбраны: значение нагрузки, значение смещения, значение деформации, значение напряжения, значение деформации, скорость затухания нагрузки, приращение нагрузки, усиление смещения, приращение деформации, приращение напряжения, приращение деформации, значение затухающей нагрузки и т. Д. После достижения этого условия, автоматически прекращается проверка и автоматически регистрируются данные и кривые,

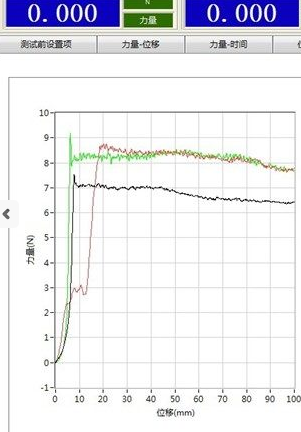

Программное обеспечение обладает функцией визуализации отображения экспериментальных данных, которая позволяет в процессе испытания в режиме реального времени проводить кривые времени, кривые гистерезиса, числовые дисплеи и структурную анимацию вибраций.
Henglexingke поддерживает « качество * » корпоративного духа, основанного на честности, научно - технических инновациях для развития, с энтузиазмом, чтобы предоставить пользователям полное экспериментальное тестовое решение.
Миссия Henglexingke: « Преследование *, оживление науки и техники», непрерывные усилия по оживлению национальной промышленности!
Похожий продукт рекомендовать